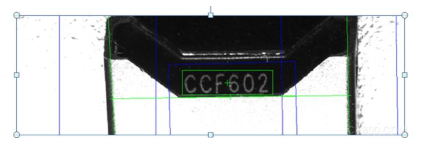
1.在塑料殼內(nèi)側的上方有一行激光標刻的字符,軟件主要檢測字符有沒有打上去,上下左右有沒有打偏,精度為±0.5MM。
2.檢測時產(chǎn)品不停下來,運動中檢測
3.產(chǎn)品到位有觸發(fā)信號。
4.相機傾斜拍照.

相機:200萬像素
德國AVT工業(yè)相機,分辨率 1600×1200像面尺寸1/1.8幀率 60fps快門類型 全局黑白,理論精度可以達到25/1600=0.015毫米。
鏡頭:遠心鏡頭0.288倍,工作距離為95毫米。(工作距離為鏡頭底部到產(chǎn)品表面距離)
光源:兩個條形光源
光源控制器:模擬控制器。
軟件:CKvisionBuilder3.0 或CKvisionBuilder3.0 開發(fā)版
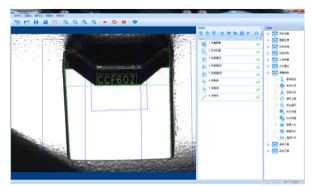
1.首先用測量直線工具找出產(chǎn)品的左邊和右邊、凹邊邊緣直線,再用各邊緣直線計算出兩條直線的交點坐標,然后再計算產(chǎn)品的凹邊中心位置坐標
2.用形狀匹配工具匹配出字符的位置坐標,
3.可以通過設定兩個坐標的距離范圍來判斷字符是否在產(chǎn)品規(guī)定位置
文章來源:互聯(lián)網(wǎng),犀靈機器人http://www.eastjq.net整理發(fā)布